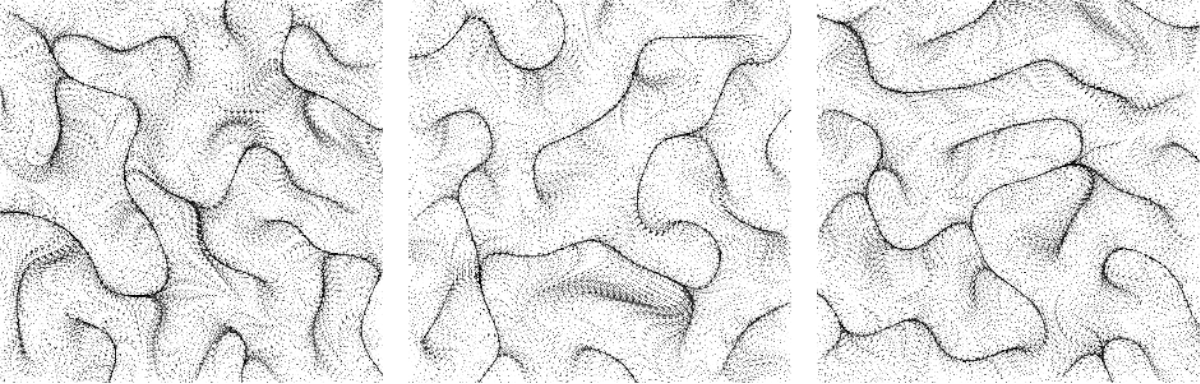
OpenSimplex Flow Fields ()
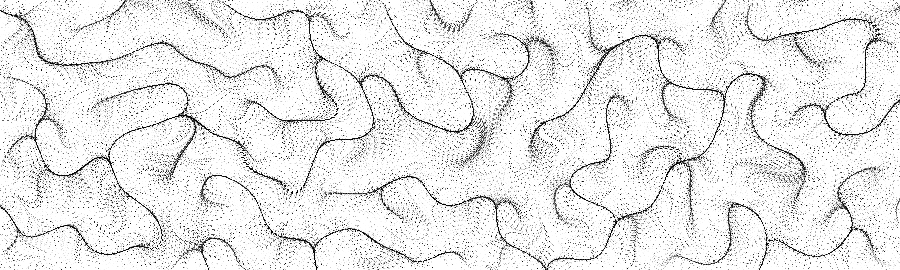
[sketch]
- Tools: Python
- Source code: https://github.com/vec2pt/py-sketches
- Links:
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import opensimplex
matplotlib.use("TkAgg")
def opensimplex_flow_fields(
width: int = 512,
height: int = 512,
particles_count: int = 3000,
generations: int = 500,
noise_scale: float = 5.0,
particles_step: float = 5.0,
particles_opacity: float = 0.99,
) -> np.ndarray:
"""OpenSimplex Flow Fields
Args:
width (int, optional): Width. Defaults to 512.
height (int, optional): Height. Defaults to 512.
particles_count (int, optional): Particles count. Defaults to 3000.
generations (int, optional): Generations. Defaults to 500.
noise_scale (float, optional): Noise scale. Defaults to 5.0.
particles_step (float, optional): Particles step. Defaults to 5.0.
particles_opacity (float, optional): Particles opacity. Defaults to 0.99.
Returns:
np.ndarray: OpenSimplex Flow Fields result
"""
shape = (height, width)
x, y = (
np.linspace(0.0, 1.0, shape[1]) * noise_scale * shape[1] / min(shape),
np.linspace(0.0, 1.0, shape[0]) * noise_scale * shape[0] / min(shape),
)
noise = opensimplex.noise2array(x, y)
particles_coords = np.array(
[
np.random.randint(0, height, size=particles_count),
np.random.randint(0, width, size=particles_count),
]
)
img = np.zeros(shape=shape)
img[*particles_coords] = 1
for _ in range(generations):
img *= particles_opacity
noise_val = noise[*particles_coords] * 2 * np.pi
new_particles_coords = particles_coords + np.round(
np.array([np.cos(noise_val), np.sin(noise_val)]) * particles_step
).astype(np.int64)
random_coords = np.array(
[
np.random.randint(0, height, size=particles_count),
np.random.randint(0, width, size=particles_count),
]
)
new_particles_coords = np.where(
(new_particles_coords[0] >= height)
| (new_particles_coords[1] >= width)
| (new_particles_coords[0] < 0)
| (new_particles_coords[1] < 0),
random_coords,
new_particles_coords,
)
particles_coords = new_particles_coords
img[*particles_coords] = 1
return img
if __name__ == "__main__":
opensimplex.seed(42)
result = opensimplex_flow_fields()
plt.imshow(abs(result - 1), cmap="gray", vmin=0, vmax=1)
plt.show()